
Авторизация
Войти на этот сайт вы можете, используя свою учетную запись на любом из предложенных ниже сервисов.
Компания Optifuel выпустила топливо Pro Blend 30% Ultra ULV

В продажу поступило новое топливо от компании Optifuel — Pro Bend 30% Ultra ULV (ULV – Ультра Низкая Вязкость). Первоначально доступная лишь пилотам Optiteam, эта смесь сверхвысокой мощности дает пилоту максимальную приемистость (чувствительность двигателя к открытию дроссельной заслонки), развивает большую мощность и дает меньший нагрев двигателя.
Пилоты Optiteam тестировали ULV в течении нескольких месяцев, за которые были израсходованы тысячи литров топлива, для того чтобы донести до потребителя идеальное горючее.
Источник Heliplane
Mikado анонсировали Logo 700 и 600SX

Mikado объявили приблизительную дату релиза новых моделей электро вертолетов 700 XXtreme и 600SX на мероприятии Dahlhouse Fligtline. Модель 600SX станет доступна в Июле – Августе 2012, а 700 XXtreme будет готов к продажам в Августе 2012. Представители Mikado обещают более подробную информацию в ближайшее время.
Источник Heliplane
Летная школа. Часть 8. Готовимся к инверту.

Летная школа. Часть 8. Готовимся к инверту.
Давно у нас не было летных уроков. Надеюсь, ваше обучение идет своим чередом, пируэты, петли, бочки и воронки уже получаются во всех направлениях и вы уже подумываете о том, чтобы поскорее начать осваивать 3D! Следующий шаг, это освоение полета в инверте, без которого 3D не станет настоящим.
Тема инверта достаточно обширна и потребует определенного времени на освоение, поэтому прежде чем двинуться вперед, самое время оглянуться назад и мысленно повторить все, что уже пройдено в нормальном полете. Вспомните, какие фигуры и маневры уже получаются хорошо, что еще не до конца доработано, а может есть и совсем нетронутые темы. Двигаясь вперед всегда полезно вернуться немного назад и отполировать пройденный ранее материал, тем не менее, постарайтесь не оставлять явных пробелов в нормальном полете, поскольку подтягивание «хвостов» будет восприниматься как потеря времени.
На сегодня желательно освоить следующее:
1.Висение в нормальном полете всеми сторонами к пилоту. Если в определенных положениях все еще присутствует неуверенность, поработайте над этими положениями в висении и проверьте навыки с помощью медленного пируэта на месте.
2.Разворот на горке слева и справа от пилота с пируэтом по часовой и против часовой. Важно уделить внимание тому, что бы в точке разворота вертолет не смещался, а зависал в одной точке (особенно это касается работы шагом).
3.Полет по кругу и восьмерка. Качественное выполнение этих фигур подразумевает постоянство скорости, высоты, правильную форму круга и симметричность восьмерки.
Особое внимание стоит уделить мертвой петле, поскольку в ней присутствует небольшой фрагмент инвертного полета. Важно освоить петлю по часовой и против часовой стрелки, чтобы избежать «однорукости».
4.Бочка так же имеет инвертную часть, поэтому важно освоить эту фигуру при полете слева-направо и наоборот, с переворотом через правый и левый бок.
5.Авторотация. Как минимум простая авторотация по прямой должна присутствовать в вашем репертуаре.
Подготовка модели.
Для полета в инверте необходимо использовать режим Idle (пилотажный режим) с симметричным шагом в положительной и отрицательной зоне (например, +12...-12 градусов) и с шагом ноль градусов в среднем положении стика шага. Во всем диапазоне работы шагом необходимо иметь постоянные обороты ротора. В зависимости от модели добиться этого можно как кривыми газа, так и с использованием гувернера. С гувернером несколько проще. Чувствительность гироскопа должна быть не слишком высокой, чтобы не было автоколебаний, но и не слишком низкой, чтобы хвост хорошо держал положение во время маневров.
Дополнительную информацию о подготовке модели и о выполнении петли и бочки смотрите в статье «Летная школа. Часть 5. Петля и бочка.».
Введение в инверт.
Прежде чем осваивать новое, найдем связующие нити с пройденным материалом. Начнем с модификации петли и бочки. В исходных фигурах присутствует короткая инвертная фаза, которую можно немного растянуть и тем самым начать привыкать к отрицательному диапазону шагов.
1.Овал: тоже самое, что и петля, но верхняя и нижняя фазы растянуты.
По сути необходимо выполнить обычный заход на петлю, а в верхней часть элеватором от себя перевести модель в горизонтальный инвертный полет, увеличить отрицательные шаги примерно до 5...6 градусов и удерживать стик элеватора немного на себя, чтобы сохранять горизонтальное движение. При первых попытках держите инвертную фазу непродолжительно, в течение 3-5 метров или меньше, затем сразу выполняйте обычный спуск с петли и заходите на следующую попытку. Сейчас вв ерхней фазе лучше не корректируйте модель по элеронам, если модель будет сходить с траектории, сразу выходите из маневра обычным спуском с петли (стик элеватора на себя). Заход на петлю держите против ветра, чтобы после подъема и перехода в инвертную фазу вертолет сносило по ветру: так будет проще сохранять горизонтальную скорость.

Овал
2.Бочка с задержкой в инвертной фазе.
Аналогично петле задержим бочку в инвертной фазе. Длина задержки небольшая: 2-3 метра или меньше. Будьте готовы продолжить переворот модели в нормальный полет с помощью элеронов при первых признаках отклонения модели от прямолинейной траектории. Порядок отработки маневра такой же, как и при отработке обычной бочки: сначала в зоне наилучшего восприятия модели (сзади), затем переносите инветную фазу в зону перед пилотом. В инвертной фазе добавляйте немного элеватора на себя для поддержания горизонтального движения. Сам маневр делайте по ветру.

Бочка с растянутой инвертной фазой.
Флипы и роллы на месте.
На месте переворот в инверт можно выполнить с помощью флипа (переворот на месте по элеватору) или ролла (переворот на месте по элеронам). Самое важное в таких переворотах этот синхронная работы шагом в зависимости от положения модели во время переворота.
Флип назад.
Освоение синхронной работы шагом сейчас является главной задачей. Для этого начнем с отработки флипа назад, поскольку по сути этот маневр использует движения, схожие с движениями при выполнении петли. Разница лишь в том, что во время петли вертолет имеет горизонтальную скорость, которая помогает поддержать высоту полета. Работа шагом на петле сильно растянута во времени, поэтому петля не так требовательна к точности работы шагом. Уменьшая петлю попробуем получить некое подобие флипа на месте. Для получения маленькой петли необходимо снизить скорость движения и во время переворота сильнее отклонить стик элеватора на себя. В остальном работайте стиками так же, как и при выполнении обычной петли. По мере снижения скорости захода на петлю и увеличения отклонения элеватора на себя потребуется все быстрее работать шагом, что бы поспевать за быстрым переворотом модели.

Маленькая петля — почти флип.
Как делать переворот на месте.
Перейдем непосредственно к переворотам на месте. Описание, приведенное ниже, подходит для всех направлений переворота, через хвост, через нос или через бока. Начать стоит с флипа назад.
Выберите положение модели, из которого вам будет удобнее делать переворот. Привычнее всего положение модели «хвостом к пилоту», поскольку после переворота может потребоваться корректировка положения модели и в положении «хвостом к пилоту» делать это несколько проще. Если вы преуспели в предыдущем упражнении с маленькой петлей, возможно проще будет начать с флипа боком к пилоту. Итак, маневр:

Флип назад.
Прежде чем начать переворот необходимо стиком шага коротко подкинуть модель вверх. Толчек вверх должен быть совсем короткий, но достаточно быстрым, чтобы модель едва начала подниматься и тут же стик шага необходимо начать двигать назад. Модель наберет немного высоты и затем зависнет в невесомости, одновременно начинайте переворот. Убавляйте шаг синхронно с перворотом модели, что бы в положении «на ноже», когда ротор окажется вертикально, шаги были в нуле (среднее полжение стика шага). По мере переворота модели в инверт необходимо начать пропорционально увеличивать отрицательные шаги. Когда модель перевернется ротором вниз, шаги должны быть примерно в зоне -5...-6 градусов. В этот момент необходимо коротко подкинуть модель вверх небольшим добавлением отрицательного шага и тут же начать убавлять шаги по мере переворота модели в следующее положение на ноже. В положении «на ноже» стик шага опять должен быть в среднем положении. Теперь, по мере дальнейшего переворота модели, прибавляйте шаги и к моменту, когда модель перевернется ротором вверх, шаги должны быть в точке висения (около +5...+6 градусов). Добейтесь относительно постояннго положения модели во время переворота, затем переходите к отработке ролла.
Чуть сложнее будет с флипом вперед. Хотя по сути требования к работе шагом не меняются, но отклонение элеватора вперед может поначалу сбивать с толку, поэтому первые попытки флипа вперед делайте с особым вниманием.
Сейчас делайте не более одного переворота за раз. После переворота остановите модель, подровняйте ее и только затем делайте следующий переворот.
В итоге желательно уметь делать перевороты по всем направлениям: через нос и через хвост, через левый и правый борт.
Еще раз хочу обратить внимание, что первые попытки новых маневров необходим делать повыше и подальше от себя. Дополнительная высота и расстояние до пилота служат своего рода зоной безопасности на случай, если события будут развиваться не так, как ожидалось.
Что может пойти не так:
1.Шаг меняем слишком медленно. В этом случае модель будет описывать круг в воздухе, сначала подниматься и уходить вбок, затем опускаться и двигаться в сторону в противоположном направлении.
2.Шаг меняем слишком быстро. В этом случае в самом начале переворота модель будет проваливаться вниз и сильно уходить в сторону во время переворота из инвертного положения в нормальное.

Ошибки при работе шагом на переворотах.
3.Во время флипа модель кувыркается не ровно через хвост или нос, а кувыркается немного через бок. Это явный признак наложения каналов, когда при работе элеватором вмешивается управление по элеронам. Причина чаще всего в особенностях работы ротора вертолета конкретной модели, но также возможно, что пилот сам задевает канал элеронов. Попробуйте одновременно с отклонением стика на себя также немного отклонять стик по элеронам, пока не получите ровные перевороты.
На сегодня это все. Не пожалейте времени на освоение качественных флипов и роллов на месте, добейтесь того, чтобы модель оставалась близко к одной точке во время переворота и помните, что время, потраченное на отработку базовых фигур позволит в дальнейшем значительно сократить время на освоение более сложного пилотажа. Флипы и роллы присутствуют во многих фигурах (например: круг с кувырками (Tumbling circle) и Вугли (Whoogles)) или могут стать связующим звеном при переходе от одной фигуры к другой во время фристайла. В следующий раз перейдем непосредственно к освоению ориентации в инверте.
При написании статьи использовались материалы книги «3D Helicopter flying» by Russ Deakin.
Источник: Олег Муринский
- 1
- max-kolosov
- 25 апреля 2012, 02:35
- 4093
- 0
- Поделиться:
Летная школа. Часть 7. Авторотация.

Летная школа. Часть 7. Авторотация.
Сегодня мы зайдем в сумрачную зону пилотажа, где полет модели заметно отличается от привычного, где вертолет сможет парить как планер и добывать энергию в буквальном смысле слова из воздуха. Мы будем учиться собирать эту энергию, сберегать ее и тратить крайне осмотрительно. И так, сегодня тема авторотации.
Для чего?
В первую очередь для того же, для чего применяется авторотация на реальных вертолетах — для спасения машины, экипажа и пассажиров в случае неисправности мотора. Возможно, кто-то возразит, что ни разу не сталкивался с неисправностью мотора своей модели в воздухе. И действительно, если вы пилотируете модель на электротяге, то отказ мотора — штука крайне редкая. Разве что регулятор даст отсечку по перегреву или превышению максимального тока. Другое дело модель с ДВС. Здесь вероятность отказов намного выше, от банального «ой, топливо закончилось», до лопнувших топливных трубок, проблемы с поддувом, бедного мотора, и совсем уж плохих неисправностей типа разрушенной цилиндропоршневой группы.
Впрочем, если вас не беспокоит тема падений из-за отказа силовой установки, тогда подумайте о освоении аэробатики с выключенным мотором. Аэробатика во время авторотации, эта совершенно отдельная область полетов, крайне захватывающая и зрелищная, даже независимо от результата. :-)
Если вы заинтригованы, то эта статья для вас, в противном случае можете возвращаться к привычным полетам и готовиться к починке поломанных шасси. ;-)
Что требуется от модели для авторотации?
Во-первых, нужна модель, которая в принципе умеет выполнять авторотацию. Модель должна иметь изменяемый общий шаг и должна быть оборудована обгонной муфтой, позволяющей ротору свободно вращаться при остановленном моторе. Модели с фиксированным шагом, в том числе и вертолеты соосной схемы для авторотации не годятся абсолютно.
Во-вторых, важен размер модели, поскольку от этого зависит способность ротора запасать энергию. Я не видел, что бы модели класса 200-250 выполняли авторотацию. Нечто похожее на авторотацию выполняют модели 450-ого и 500-ого класса, но не все и не особо хорошо. Вполне сносно авторотируют модели 30-ого класса ДВС или 550-ого класса электро (с лопастями 550мм). Настоящий фан авторотации начинается с моделей 50-ого и 90-ого класса, т.е. с размера лопастей 600мм-700мм. Чем длиннее лопасти, тем больше энергии может запасти ротор и тем больше позволит сделать модель.
В-третьих, потребуется настройка режима отключения мотора Throttle Hold. Настройка выполняется в аппаратуре и зависит от вашего передатчика. В этом режиме для ДВС мотор должен переходить на холостой ход, для электромодели мотор должен полностью отключаться.
В-четвертых, кривая шага в режиме Throttle Hold должна иметь как минимум -4 градуса в нижнем положении стика шага и +10...+12 градусов в верхнем. Я предпочитаю кривую шага, совпадающую с режимом Idle Up, т.е. симметричную: с нулем в центре и общим диапазоном: -12...0...+12. Отрицательные углы понадобятся для раскрутки ротора во время спуска, положительные для посадки модели.
В-пятых, лопасти! Для авторотации больше подойдут тяжелые лопасти, так как они позволят запасти больше энергии. Совсем легкие лопасти, скорее всего, не дадут достаточного запаса для плавной посадки. Подбор лопастей, подходящих одновременно для вашего стиля полета и для авторотации, вещь сугубо индивидуальная. Как отправную точку можно использовать рекомендацию производителя вашей модели. Обычно рекомендуют некие усредненные лопасти, которые вполне подойдут и для 3Д полета и для авторотации.
Идея авторотации.
Ошибочно думать, что авторотация это падение вертолета. Спуск в набегающем потоке воздуха позволяет поддержать обороты ротора и раскрутить его для плавной посадки. Во время спуска ротор работает, как ветряная мельница. За счет потери высоты потенциальная энергия парящей модели переходит в кинетическую энергию вращения ротора. Подробное рассмотрение сил, действующих на ротор во время авторотации достойно отдельной статьи. Здесь же приведу пару иллюстраций, чтобы понять основную идею.
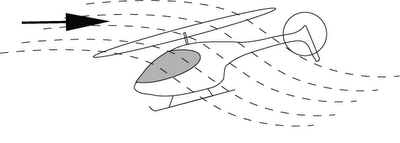
Полет под тягой.
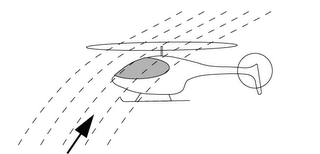
Авторотация.
Практика — полноценный спуск.
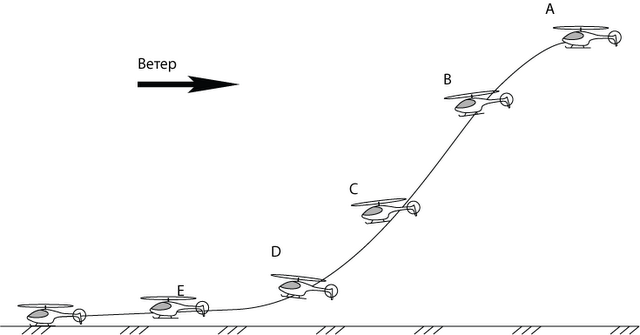
Начнем с полного описания маневра и затем перейдем к описанию деталей. Итак, исходное положение на высоте 30-50 метров (можно и выше, но позже), носом против ветра. Стачала необходимо дать небольшой разгон вперед и затем выключить двигатель (Точка А). Во время спуска шаги необходимо удерживать на уровне -3-5 градусов. При кривой шага +-12 градусов это соответствует положению стика чуть ниже средней точки. При определенном шаге лопасти будут издавать легкое равномерное фырчанье, что говорит о наиболее эффективном для авторотации шаге лопастей, хотя при этом спуск может быть достаточно быстрый.
Схема выполнения авторотации
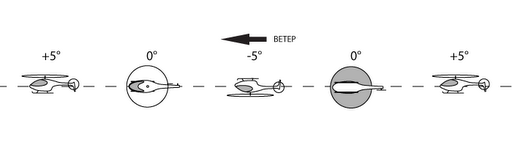
Далее идет фаза планирования (Точка B и C), при которой вертолет двигается вперед и постоянно снижается, а скорость вращения ротора поддерживается за счет набегающего снизу потока воздуха. Угол спуска зависит от силы встречного ветра. Чем ветер сильнее, тем круче нужно держать линию спуска, т.е. горизонтальная скорость модели относительно земли будет ниже, но относительно набегающего воздуха скорость будет примерно одинакова в обоих случаях.
Зависимость угла наклона линии спуска от силы встречного ветра.
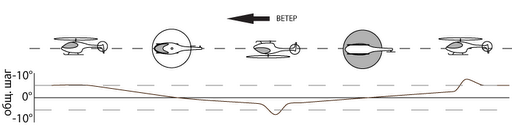
Во время спуска модель удерживается либо горизонтально, либо с небольшим наклоном вперед. В первом случае горизонтальная скорость модели постоянная или снижается, а вертикальная скорость относительно небольшая, во втором случае модель спускается быстрее и набирает горизонтальную скорость. Примерно за 3-4 метра до земли необходимо начать выполнять маневр «торможение» (Точка D), т.е. отклонить модель по элеватору немного назад. При этом скорость вращения ротора увеличивается, а горизонтальная скорость падает. В этот момент происходит переход энергии горизонтального полета в дополнительную энергию вращения ротора. Высота начала выполнения торможения зависит от размера модели: чем больше модель и выше скорость приближения к точке посадки, тем выше надо начинать торможение. Во время торможения можно немного убавить отрицательные шаги, что бы модель замедлялась быстрее. Для окончательного торможения перед посадкой плавно добавляем положительные шаги и в этот момент запасенная в роторе энергия начинает интенсивно расходоваться. Обычно, с тяжелыми лопастями энергии в роторе хватает на остановку и непродолжительное (2-4 сек) зависание перед посадкой. С более легкими лопастями запаса для зависания может не остаться, тогда посадку надо выполнять с ходу, без запаса на ошибку. Перед самой посадкой желательно немного наклонить модель на нос, чтобы сберечь привод хвостового ротора (Точка E).
Еще одна опасность жесткой посадки с касанием хвостом — возможность удара по балке. В сочетании с мягкими демпферами и отклонением стика элерона назад, жесткая посадка может привести к тому, что ротор отклонится назад слишком сильно и ударит по балке, поэтому сразу привыкайте перед самым касанием выравнивать вертолет в горизонт или даже немного наклонять вперед.
Тренировка.
Спуск с мотором.
Для начала необходимо отработать спуск модели к точке посадки, не выключая мотор и не сажая модель. Это упражнение позволит отработать навык ориентации во время непрерывного спуска модели по наклонной линии. Воображаемая точка посадки должна быть расположена на безопасном расстоянии в 5-9 метрах перед пилотом. Начнем с высоты 10 метров и линии спуска под 45 градусов к горизонту. Ровно завесьте модель, толкните немного вперед и установите шаги примерно на уровне -4 градуса. За 2-3 метра до земли выполните торможение, немного отклонив модель назад, и остановите спуск, добавив положительные шаги. Во время торможения обратите внимание на то, что модель должна начать снижать горизонтальную скорость и скорость спуска. Обратите внимание на то, в какую точку пришла модель во время спуска, если не долетела до воображаемой точки посадки, то в следующий раз скорректируйте начало маневра: в ветреную погоду начальную точку выберите ближе к себе, в тихую погоду увеличьте горизонтальную скорость в начале маневра.
Отработайте спуск с разных сторон: слева, справа, и из диагональных направлений под 45 градусов носом к себе. Из соображений безопасности во всех случаях не допускайте, чтобы модель спускалась прямо на вас, линия спуска всегда должна проходить мимо. Затем во время спуска начните корректировать направление, немного поворачивая модель влево-вправо рулем и элеронами.
Отдельно отработайте посадку в положении боком и кабиной к себе. Выполните это упражнение из висения перед собой. Навык посадки боком и кабиной к себе пригодятся при реальной посадке во время авторотации.
Освоив спуск и посадку, выполните комбинированный маневр, состоящий из обоих элементов: спуск с высоты 10 метров к точке посадки и сама посадка без длительного зависания перед касанием земли.
Теперь попробуйте увеличить высоту и повторите упражнение. Обращайте внимание на то, в какую точку приходит вертолет, и соответствующим образом корректируйте точку начала спуска и начальную скорость.
Аварийный выход.
Как и в остальных упражнениях, здесь тоже есть аварийный выход, который, в этот раз больше зависит от модели, а не от пилота. Суть его проста — иметь возможность запустить мотор из состояния Throttle Hold. Для ДВС потребуется уверенная работа мотора на холостых оборотах в режиме Throttle Hold и надежный выход на рабочие обороты. Если аппаратура позволяет, добавьте небольшую паузу на переход из режима Throttle Hold в Idle. 1,5-2 сек. будет достаточно и позволит снизить нагрузку на сцепление и шестерни во время раскрутки мотора. С электромоделями все несколько сложнее, поскольку обычно в регуляторах используется мягкий старт, который при попытке выхода из авторотации может стать причиной значительной задержки в раскрутке ротора. Для тех, кто использует регуляторы Castle Creations, доступен специальный режим авторотации, благодаря которому возможна быстрая раскрутка ротора при переключении из Throttle Hold в Idle.
Я готов к авторотации?
Это хороший вопрос, ведь в авторотации есть только одна попытка и к этой попытке лучше тщательно подготовиться. Скорее даже подготовиться морально: мысленно повторите последовательность действий, выполните пристрелочный спуск с работающим мотором, убедитесь, что вы правильно выбрали точку начала спуска, скорость и угол спуска и затем… просто сделайте это. :) Уверен, что у большинства авторотация получится с первого раза, и если уж не делать совсем грубых ошибок, то посадка пройдет гладко и вы по праву будете горды и собой и вашей моделью, которая, как и вы смогла сделать ЭТО и уцелеть. Один мудрый совет я вычитал в свое время и делюсь с вами: сделайте первую попытку в воскресенье ближе к концу летного дня. Если все пройдет гладко, сможете спокойно собраться и поехать домой с чувством полного удовлетворения. Если же полет закончится с происшествием, то, во-первых, сегодня вы уже полетали, а значит день прошел не зря, во-вторых, у вас будет целая неделя на то, что бы подготовить модель к следующим выходным.
Приступим. Реальный спуск с высоты 10-20 метров.
Для меня спуск с 10 метров представляется несколько сложнее, чем со 100 метров, потому что практически нет времени на установку нужного шага или коррекцию спуска. Спуск, торможение и посадка происходят на одном дыхании. Тем не менее, даже при грубой ошибке вероятность сильного падения с такой высоты практически отсутствует, поэтому начнем именно с нее. Все, что необходимо не забыть сделать, это направить модель носом против ветра, толкнуть немного вперед, выключить двигатель и добавить немного(!) отрицательных шагов. За 1.5-3 метра до земли наклонить вертолет немного назад и плавно добавить положительных шагов до полной остановки горизонтального движения, за мгновение до посадки подровнять модель в горизонт и сажать.
Получилось? Отлично! Но не спешите сразу повторить свой подвиг. Потерпите до следующего летного дня, чтобы сначала переварить ваши эмоции и приобретенный опыт.
Спуск со 100 метров.
Вот где начинается фан авторотации. Спуск с большой высоты сравним с прыжком банджи. Если прыгнуть без оборудования, то катастрофа неминуема, если же вооружиться резиновым жгутом (в нашем случае техникой авторотации), то кайф от плавной посадки в нужной точке и аплодисменты зрителей будут вам наградой. В целом, для спуска с такой высоты не потребуется какой-то специальной техники кроме орлиного зрения и понимания принципов авторотации. Линейно продолжите траекторию от 10 метров вверх до желаемой высоты и сделайте все то же самое. Во время спуска можно немного растянуть траекторию, если выровнять модель в горизонт и убавить отрицательные шаги. Можно ускорить спуск, наклонив модель немного носом вперед и добавив немного отрицательных шагов. Следите за скоростью приближения модели. Для остановки с более высокой скорости торможение нужно будет начинать раньше и выше.
Что может пойти не так, и на что обратить внимание:
1.Модель спускается слишком быстро или слишком медленно. В зависимости от силы ветра старайтесь держать спуск модели ближе к 45 градусам к горизонту для тихой погоды и ближе к 60 градусам для ветреной. Если модель отклоняется от этой линии, значит вы добавили слишком много или мало отрицательных шагов.
2.В ветреную погоду выполнять авторотацию проще, так как при посадке, когда скорость модели относительно земли невысока, ветер увеличивает количество воздуха, проходящего через ротор, и тем самым поддерживает вращение лопастей.
3.В тихую погоду или в штиль энергии для посадки модели будет меньше, так как нет встречного ветра, который помогает раскрутить ротор.
4.Если в лопастях не остается энергии для плавной посадки, то либо вы держали слишком мало отрицательных шагов и ротор сильно затормозился, либо сильно натянут ремень и велики потери в трансмиссии, либо лопасти слишком легкие и не запасают достаточно энергии.
5.Не стоит давать полные отрицательные шаги. Скорость спуска при этом значительно вырастет, а скорость вращения ротора может даже снизиться.
6.Полностью гасите горизонтальную скорость как можно ближе к земле и не задерживайте вертолет в висении над землей, так как в момент срыва вертолет будет неуправляемо падать. Лучше посадить модель за мгновение до того, как лопасти перестанут держать.
Что еще:
Растянутая авторотация.
Эта авторотация потребует определенных уверенных навыков для успешного выполнения. Суть маневра сводится к тому, что бы на последней стадии спуска, во время торможения продолжить полет вперед почти над самой землей. При этом необходимо почти полностью выровнять модель в горизонт, сохранив небольшой дифферент на корму, чуть прибавить положительных шагов и внимательно следить за оборотами, что бы посадить модель за мгновение до того, как закончится энергия в лопастях. И немного энергии надо оставить для гашения горизонтальной скорости перед самой посадкой.
Растянутая авторотация. В точке Е необходимо удерживать шаги едва достаточными для полета и затем приземлиться на остатках инерции в лопастях.
Хорошо освоившись с обычной авторотацией, попробуйте выполнить авторотацию хвостом вперед и авторотацию с пируэтом. Пируэт лучше выполнять в сторону вращения ротора, чтобы не тратить энергию на преодоление сил трения в трансмиссии вертолета.
Заключение.
На сегодня все, но это не значит, что тема авторотации исчерпана. Мы еще вернемся к ней в темах о 3D полетах, что бы посмотреть, как выполняется авторотация с бочкой К1.5, авторотация с флипом К2, а так же блейд стоп — авторотация с остановкой ротора в воздухе. Тем временем практикуйтесь, набивайте руку и глазомер, подбирайте лопасти и настраивайте моторы и регуляторы. Все это очень пригодится и при освоении более сложных элементов авторотации.
До встречи на полях!
Источник: Олег Муринский
- 1
- max-kolosov
- 22 апреля 2012, 18:14
- 6042
- 0
- Поделиться:
Капоты от Swissrumpf

Некоммерческое сообщество Swissrumpf из Швейцарии представила очень интересные капоты для вертолетов 600-700 класса. Капоты разработаны одним из участников сообщества и производится полностью вручную. Кому интересная данная разработка могут связаться с автором через сайт для покупки или получения инструкций по изготовлению данного чуда.









Источник: Swissrumpf
Летная школа. Часть 6. Движение боком и хвостом вперед.

Летная школа. Часть 6. Движение боком и хвостом вперед.
Продолжаем осваивать базовые навыки движения вертолета, и в этот раз рассмотрим движение боком и хвостом вперед. Кроме собственно отработки навыка управления, эти ориентации позволят освоить несколько новых, достаточно интересных фигур. И так, обо всем по порядку.
Разминка по пройденным темам.
Разворот на горке 540 градусов.
Начните выполнять разворот на горке как обычно, но в этот раз сделайте разворот не на 180 градусов, а на 540, т.е. во время разворота сделайте один полный пируэт и еще половину пируэта, после чего модель должна оказаться в положении носом вниз. Старайтесь, что бы разворот был выполнен симметрично относительно точки зависания модели, начните разворот за мгновение до зависания и закончите через мгновение после начала спуска модели. При этом пируэт не должен быть очень быстрым. Разворот без спешки покажет, что вы полностью контролируете модель. После разворота старайтесь сделать остановку пируэта точно кабиной вниз, без дополнительной коррекции хвостом.
Разворот 540 градусов на горке.
Двойная петля.
Выполните обычную мертвую петлю и после выхода с петли сразу начните выполнять следующую. Старайтесь, что бы вторая петля прошла по траектории первой.
Двойная петля.
Движение боком.
Ориентация.
Некоторые элементы движения боком уже встречалось при отработке висения хвостом и кабиной к себе. Что бы убедиться, что вы освоили эти движения и способны полностью контролировать модель, выполните упражнение из положения хвостом и кабиной к себе, двигая модель влево-вправо на 3-5 метров. Следите за скоростью и прямолинейностью, по необходимости корректируйте направление элеватором.
Движение боком из положения хвостом к себе.
Движение боком из положения кабиной к себе.
Теперь перейдем к отработке движение из положения боком к пилоту. Поднимите вертолет и расположите в положении боком к себе, примерно в 10 метрах перед собой. Помните, что диск ротора должен быть выше головы! Двигайте модель от себя и к себе на 3-5 метров. Сначала двигайте модель короткими толчками стика элеронов, с ростом навыка старайтесь сразу давать нужное количество движения стиком, что бы модель двигалась медленно и плавно. Повторите упражнение другим боком. Следите за тем, что бы модель не отклонялась от прямолинейного движения, корректируйте уводы элеватором. Не разгоняйте модель, сейчас важна не скорость, а точность управления.
Освоив движение по всем четырем направлениям, выполните полный квадрат. Начните из положения хвостом к себе, отведите модель в сторону на 5 метров, зафиксируйте положение на секунду, поверните модель на 90 градусов кабиной в центр и проведите вертолет от себя на 5-10 метров вглубь поля. Остановите, поверните еще на 90 градусов в положение кабиной к себе и проведите вертолет по дальней стороне квадрата. Выполнив еще два поворота и пролета, замкните квадрат полностью. Повторите упражнение, но теперь держите модель кабиной наружу квадрата. Выполните упражнение по часовой и против часовой стрелки. Добейтесь того, что бы вы могли достаточно уверенно удерживать направление движения с помощью элеватора.
Движение боком. Квадрат.
Круг хвостом и кабиной в центр.
Переходим к более сложному маневру. Теперь к движению боком добавим управление хвостом и пустим модель по кругу. Вы можете начать с отработки движения хвостом или кабиной в центр, смотрите, что для вас будет удобнее. На данном этапе важно понять, как поймать баланс движения модели и поворота хвостом. Я расскажу на примере движения кабиной в центр против часовой стрелки.
Круг кабиной в центр против часовой стрелки.
Короткими толчками начните движение боком вправо из положения хвостом к себе, затем начните добавлять немного руля влево. Если будет сложно управлять одновременно и по элеронам и рулем, можно давать команды на управление по очереди. В дальнейшем надо добиться, что бы наклон модели элеронами в сторону движения и управление рулем выполнялись одновременно. В процессе движения модель сама начнет загибать траекторию движения по кругу. Сначала двигайтесь медленно, поскольку сейчас важно освоиться с ориентацией и замкнуть круг, т.е. научиться управлять моделью во всех точках круга. В итоге нужно поймать такое положение стика элеронов и стика руля, при котором модель будет двигаться по кругу без дополнительной коррекции. С ростом скорости потребуется добавить небольшой наклон модели к центру круга, что бы удержаться на траектории. В целом правила описанные для движения по кругу кабиной вперед справедливы и для круга боком.
Воронка.
С ростом скорости движения по кругу естественным образом придется все больше наклонять модель к центру, что бы уравновесить центробежное ускорение. При этом управление вертолетом изменится: закругление будет контролироваться элеронами против хода движения, скорость движения величиной общего шага, а высота наклоном по элеватору. Наклон по элеватору так же будет зависеть от скорости движения модели и от радиуса воронки. Чем выше скорость и больше радиус, тем круче наклонена модель и наоборот. Так же, как и на круге, рулем надо будет удерживать хвост или кабину направленными строго к центру воронки, иначе модель будет сходить с траектории.
Аварийный выход.
Поскольку сейчас вы уже хорошо контролируете модель во всех направлениях нормального полета, то аварийный выход из воронки или круга достаточно прост: выровнять модель в горизонт и, при необходимости, повернуть ее хвостом к себе.
Восьмерки боком и воронки-восьмерки.
Для восьмерок необходимо уверенно выполнять круг и воронку в обе стороны носом и хвостом в центр. Останется освоить плавный переход с одного закругления на другое. Потребуется перекинуть модель элеватором с носа на хвост и продолжить движение боком в том же направлении, но с закругление в другую сторону и наклоном противоположной части модели к центру круга. После перехода на новое закругление управление по рулю и элеватору изменится на противоположное, направление управления по элеронам не изменится.
Восьмерка боком и восьмерка-воронка.
Петля боком.
С точки зрения управления вертолетом петля боком не представляет особой сложности. Необходимо разогнать модель боком достаточно быстро и зайти на петлю так же как и в случае с обычной петлей: в начале подъема добавить больше шагов, затем убрать шаги в ноль к верхней точке и добавить положительные шаги на выходе из петли. В инвертной фазе для коррекции направления нужно помнить, что элеватор от себя наклоняет модель на хвост, на себя — на кабину. Выполнение такой петли достаточно сильно нагружает силовую установку вертолета, поскольку, во-первых при движении боком выше аэродинамическое сопротивление вертолета(особенно кабины и вертикального стабилизатора), во-вторых хвост нагружен достаточно сильно, поскольку ему необходимо держать направление поперек встречного потока воздуха. В результате размер боковой петли получается меньше, чем петли носом вперед.
Полет хвостом вперед.
Тема движения хвостом вперед достаточно обширна, многие фигуры содержат фазы движения хвостом вперед или полностью выполняются хвостом вперед, поэтому важно на раннем этапе уделить этой теме достаточно внимания.
Начало.
Если оглянутся на пройденный материал, то движение хвостом вперед уже встречалось, когда отрабатывали висение хвостом к себе. В этот раз необходимо освоить движение хвостом вперед во всех направлениях и начнем с движения параллельно линии полетов.
Как обычно, начнем с малого — движение хвостом вперед в зоне наилучшего восприятия модели: слева и справа от пилота. Отведите модель в сторону кабиной вперед примерно на 10 метров. Остановите модель и начните движение обратно параллельно линии полетов хвостом вперед.
Полет хвостом вперед из положения хвостом к пилоту.
Сейчас важно не торопиться, подталкивайте модель короткими толчками стиком элеватора на себя. Во время этого упражнения не корректируйте модель по курсу, если модель значительно отклоняется от прямолинейного движения, остановите ее и начните упражнение сначала. Для аварийного выхода можно пируэтом развернуть модель на 180 градусов кабиной по ходу движения, и затем корректировать положение или останавливать движение. И так, сейчас необходимо медленно провести модель параллельно линии полетов, немного не доведя вертолет до средней линии, т. е. отработать движение модели хвостом вперед по направлению к себе. Немного освоившись с движением хвостом к себе, перейдите к движению модели от себя хвостом вперед. Расположите модель немного в стороне, носом к средней линии, затем двигайте модель параллельно линии полетов от себя хвостом вперед. Аналогично первому упражнению, следите, что бы модель двигалась прямо, но пока не старайтесь контролировать прямолинейность движения, сосредоточьтесь на работе элеватором.
Полет хвостом вперед из положения кабиной к пилоту.
Когда вы уже немного освоились, можно начать корректировать направление движения модели.
Управление при движении хвостом вперед.
Управление по элеронам, шагу и рулю сохраняют свое направление. Канал элеватора инвертируется. Для движения вперед нужно наклонить хвост вниз, т.е. потянуть стик элеватора на себя. Стоит отметить, что по рулю управлять моделью, двигающейся хвостом вперед, удобнее глядя на хвост и представляя, что это кабина вертолета: стик руля влево и хвост поворачивается влево, стик вправо и хвост вправо.
Теперь самое время начать корректировать направление движения модели во время пролета. Сначала выполните полный пролет слева-направо хвостом вперед. Старайтесь сохранить прямолинейное движение. Особое внимание уделите моменту прохода модели перед пилотом, так как в этот момент происходит смена ориентации с «хвостом к пилоту» на «кабиной к пилоту». Держите наготове контраварийный план, если чувствуете неуверенность, сразу поворачивай модель хвостом к себе и затем останавливайте.
Следующим упражнением будет пролет с небольшими отклонениями от прямолинейного движения. Делайте такой же пролет, как и в предыдущем упражнении, но в этот раз начните делать небольшие повороты вправо-влево, что бы траектория была похожа на волну. Для поворота по часовой стрелке необходимо стик руля отклонить вправо, а с стик элеронов влево, для поворота против часовой стрелки соответственно наоборот. Начните с 3-4 поворотов за пролет, затем делайте повороты чаще.
Полет по кругу хвостом вперед.
На круге ваши навыки полета хвостом вперед будут подвержены настоящему испытанию. Разбейте полный круг на четверти, сначала отработайте движение в первой четверти, двигая вертолет по кругу от себя. В конце первой четверти разверните модель кабиной вперед и вернитесь на исходную позицию. Постепенно начните растягивать четверть, захватывая вторую четверть, затем третью и так далее, пока не замкнете круг. Отработайте полет по кругу в обе стороны.
Восьмерки.
Разобравшись с кругами можно переходить к восьмеркам. Здесь необходимо уделить внимание смене направления движения в центре восьмерки. В целом все аналогично восьмеркам при полете кабиной вперед, поэтому используйте ваш опыт при освоении восьмерки хвостом вперед.
Разворот на горке и петля.
Вспомните, как вы начинали отработку горки кабиной вперед и перенесите методику на горку хвостом вперед. Начните с низкой, пологой горки и постепенно увеличивайте скорость входа на горку и крутизну подъема.
Освоив горку переходите к петле. Здесь уже будет немного легче, чем при освоении петли кабиной вперед, поскольку вы уже умеете добавлять отрицательные шаги в инвертной фазе. Для полного контроля модели необходимо будет освоить корректировку петли в верхней точке, т.е. в инвертной фазе. Если смотреть на удаляющийся в верхней точке вертолет (положение в инверте кабиной к пилоту), то отклонение стика элеронов влево будет двигать модель вправо и наоборот.
Что еще.
С ростом навыка отработайте так же квадратные «круги» и квадратные «восьмерки» хвостом вперед. Резкая смена направления на углах траектории позволит глубже отработать навык полета хвостом вперед.
На что обратить внимание.
1.Привыкание. Чередуйте упражнения хвостом вперед с полетами кабиной вперед, что бы избежать ситуации, когда мозг начнет путать команды для полетов кабиной и хвостом вперед.
2.Имейте ввиду, что из-за большего аэродинамического сопротивления полеты хвостом вперед требуют больше энергии, а следовательно вам придется сильнее наклонять модель по направлению движения и добавлять больше шагов.
Заключение.
Получилось довольно много теории и на ее освоение потребуется определенное время. Старайтесь не забегать далеко вперед. Двигайтесь постепенно, отрабатывая одновременно не более 2-3 новых движений. Начните с отработки полета боком, когда немного освоите круги и воронки боком, пробуйте пролеты хвостом вперед, но продолжайте заниматься с воронками большую часть времени. И обязательно повторяйте пройденный материал, что бы он перешел в активный запас фигур, из которых вы сможете составить целую композицию движений, переходящих из одного в другое без пауз и размышлений.
Хороших тренировок!
Источник: Олег Муринский
- 1
- max-kolosov
- 19 апреля 2012, 01:32
- 3968
- 0
- Поделиться:
Фотографии Mikado Logo 600SX

После появления фотографий нового Logo 700, появилось больше информации и фотографий нового Mikado Logo 600SX. По словам Кайла Даля, на форуме Helifreak, модель 600SX кардинально переработана, изменения коснулись основного ротора, хвостового ротора, приводных шестерен и много другого. По его словам данные изменения также будут доступны для 500/600 серии в виде апгрейд китов.




Источник: HeliPlane
Фотографии Mikado Logo 700

Компания Litronics2000 опубликовала фотографии нового Logo 700, как видно из фотографий новый аппарат имеет много общего с уже появившемся в продаже Logo 800 XXtreme.




Источник: HeliPlane
Летная школа. Часть 5. Петля и бочка.

Летная школа. Часть 5. Петля и бочка.
Двигаясь от простых фигур к более сложным, добрались до мертвой петли и бочки. Эти фигуры как рубеж, отделяющий пилота, летающего в горизонте, от аса аэробатики! :) Красиво выполненные петля и бочка хорошо смотрятся и непременно привлекут благодарных зрителей.
Подготовка к петле и бочке.
Вам понадобится полноценный режим Idle Up для выполнения петли и бочки. Для однозначного управления кривую общего шага желательно сделать симметричной относительно нуля (например: -10...0...+10). Если вы используете несимметричную кривую шага в Idle Up (например: -2...+4...+10), то все равно сможете выполнить эти маневры, хотя и с некоторыми оговорками. При любой кривой нужно будет научиться четко ставить стик в положение нулевого шага при выполнении маневров. На мой взгляд, при симметричной кривой сделать это проще.
Для однозначного управления важно постоянство оборотов ротора. Убедитесь, что для электромодели кривая газа в Idle имеет вид горизонтальной прямой или галки. Варианты 80%-80%-80%, 90%-80%-90% или аналогичные этим, отлично подойдут. Разумеется, если вы используете гувернер, настраивайте кривые по инструкции к гувернеру.
Для бочки желательно, чтобы модель имела среднюю или высокую скорость переворота по элеронам (около 2 сек на переворот или быстрее). Многие современные модели, предназначенные для 3D, легко справятся с этой задачей.
Прежде чем перейти к фигурам, нужно убедиться, что вы хорошо умеете делать быстрые пролеты перед собой в обе стороны. Затем проверьте, что вы хорошо освоили разворот на горке. По сути, горка это уже половина петли — половина ее подъема и половина спуска, — поэтому отработанная горка будет большим плюсом в освоении петли. Для освоения петли и бочки необходимо научиться добавлять небольшой отрицательный шаг (около 2-5 градусов) во время движения модели в инверте. Стоит заметить, что чем выше скорость и крупнее модель, тем меньший отрицательный угол нужен для поддержания модели в инвертной фазе. Для маленьких моделей может понадобиться отрицательный шаг в 5-7 градусов.
Петля.
Есть два способа выполнения петли: классический и растянутый. В первом случае заход на петлю делается в большей степени за счет инерции модели, а размер петли зависит от начальной скорости. Во втором случае модель затягивается вверх за счет тяги ротора. Размер растянутой петли ограничен только мощностью модели, а не начальной скоростью. Мне всегда было проще делать растянутые петли. Они получаются ровными, и их размер легче контролировать.
Классическая петля.
Для выполнения петли потребуется разгон. Разгоняйтесь против ветра, так модели будет легче набирать высоту при подъеме, поскольку ветер будет поддувать ротор снизу. Вход на петлю держите на высоте примерно 10м-15м, чтобы на выходе из петли иметь запас по высоте.
Выполнять маневр будем по часовой стрелке. Сначала расскажу, как летать полную петлю. Обратите внимание, что полная петля выполняется перед пилотом, симметрично относительно осевой линии, т.е. правая часть петли справа от пилота, левая слева, точка начала захода на петлю прямо перед пилотом. Саму петлю представим нанесенной на циферблат часов, чтобы было проще адресовать конкретные фазы фигуры. С 6 часов начинается фаза подъема вверх в первой четверти круга. В этот момент надо плавно добавить элеватор на себя и немного прибавить шагов, чтобы модель по дуге вышла на подъем вертикально вверх к 9-ти часам. Эта фаза аналогична заходу на разворот на горке. Для более растянутой петли нужно добавить больше положительных шагов, задержать их примерно до 10:30-11:30 и следить за положением корпуса модели, чтобы нос был направлен немного наружу петли. После чего шаги надо начать плавно убирать в ноль. В верхней точке нужно добавить немного отрицательных шагов. Обычно -2...-4 градуса бывает достаточно. Продолжаем удерживать элеватор на себя, и модель плавно заходит на спуск. Убавляем отрицательный шаг. К 1:30 отрицательные шаги нужно убрать в ноль и дать модели свободно скользить вниз по дуге. После 3-ех часов плавно прибавляем положительный шаг, чтобы вывести модель на ровный горизонтальный полет.
Растянутая петля
Выглядит немного перегружено? С ростом навыков эти действия станут более привычными. Самое сложное в первый раз: заставить себя перевернуть модель через непривычное инвертное положение. На самом деле, фаза инвертного полета очень короткая. Модель быстро проходит верхнюю точку и оказывается в более привычном положении спуска с горки, где вы уже сможете ее корректировать. Чтобы привыкнуть к перевороту через инвертное положение предлагаю два способа.
Первый способ: сделать совсем маленькую петлю, диаметром около 1-2 метров. Фактически, это будет растянутый переворот на месте. Такой маневр удобнее делать, пропустив модель в сторону и выполнив петлю, глядя на вертолет сзади. Помните про высоту, начинайте маневр повыше. Как только начнете подъем, добавьте положительных шагов, чтобы подтолкнуть модель вверх, и сразу уберите шаги в ноль. Продолжайте удерживать элеватор на себя, пока модель будет переворачиваться обратно в нормальный полет. Освоив такой маневр, начните добавлять отрицательные шаги в верхней точке, затем начните выполнять маневр симметрично относительно пилота, чтобы не привыкать к асимметричному выполнению.
Второй способ: Зайти на горку и в верхней точке перевалить вертолет через ротор, далее выполнить обычный спуск с горки. Для простоты ориентации такой маневр лучше делать прямо перед собой, чтобы подъем был, например, чуть левее, а спуск чуть правее. Во время переворота можно держать нулевой шаг, а можно добавить немного отрицательных шагов (-2…-4 градуса) как при обычной петле. Постепенно растягивайте верхнюю фазу, чтобы перевал был больше похож на верхнюю часть петли.
Про что надо помнить при выполнении петли:
1. Во время первых попыток не корректируйте модель в верхней точке. Лучше сконцентрируйтесь на работе шагом и на спуске модели. Если же модель начала сходить с задуманной траектории, и вы теряете ориентацию, пользуйтесь аварийным выходом (в тексте ниже), не дожидаясь, пока ситуация полностью выйдет из-под контроля.
2. Держите модель повыше и подальше от себя. Вход и выход из петли держите на высоте около 10-15 метров. Это даст дополнительный запас по высоте, а удаление от пилота на 15-20 метров даст дополнительный запас пространства на случай схода модели с траектории и необходимости аварийного выхода.
3. Первые попытки желательно делать при отсутствии ветра или при ровном боковом ветре, тогда вероятность отклонения модели от траектории будет минимальна. Если ветер дует в лицо, то сносить фигуру будет прямо на пилота, а такой снос поначалу сложно корректировать.
4. Перед заходом на петлю важно держать модель по элеронам строго горизонтально. Если у модели будет наклон в сторону, то и петля получится заваленной на бок. Если петля будет завалена на пилота, это особенно опасно.
5. Старайтесь тренировать петлю по часовой и против часовой стрелки, чтобы избежать однорукости.
6. Используйте симулятор, но не забывайте, что только реальная практика даст реальные навыки. :)
Аварийный выход.
Что может пойти не так, и что с этим делать:
1. Модель потеряла скорость и застыла в инверте в верхней точке или на подъеме. Полностью потяните элеватор на себя и дождитесь, пока модель не перевернется в горизонтальный полет.
2. Забыли убрать положительные шаги в верхней точке — модель будет очень быстро двигаться по дуге и с ускорением приближаться к земле. Если запаса по высоте было недостаточно, модель может очень быстро оказаться у земли и, возможно, не успеет перейти в горизонтальный полет. Спасение так же в полном элеваторе на себя и убавлении положительных шагов.
3. Модель отклонилась от плоскости круга влево или вправо. Например, модель может начать двигаться на пилота или уходить от него. Причин такого поведения может быть несколько:
наложение каналов CCPM;
неверный фазинг модели;
боковой ветер, который сместил модель;
наклон вертолета по элеронам при заходе на фигуру.
В любом случае запомните, если смотреть на вертолет в инверте сзади, то работа элеронов совпадает с нормальным полетом. Отклонение стика влево будет двигать модель влево и наоборот.
4. Избегайте положения модели, когда она окажется над пилотом или за пилотом. Оба положения опасны, поскольку легко потерять ориентацию.
Бочка.
Бочка это первый маневр, качество выполнения которого во многом зависит от синхронной работы стиком шага в зависимости от положения модели по элеронам. Опыт координации движения стиков в дальнейшем пригодится для множества фигур, где синхронная работа общим шагом и элеронами/элеватором — это ключ к успеху.
Что такое бочка для вертолета?
Уверен, все хорошо представляют себе бочку в исполнении самолета. По сути, это переворот по элеронам на 360 градусов. В случае с вертолетом суть маневра та же, только надо учесть, что в обычном состоянии ротор тянет вверх, а для бочки надо двигаться вперед. В инвертной фазе необходимо сменить тягу ротора на обратную, чтобы не впечатать модель в землю. В положении на ноже нужно убрать тягу полностью. При всем при этом важно не потерять горизонтальную скорость. Это, конечно, не все тонкости, но это описание дает понять, с чем придется иметь дело.
Описание полной бочки.
Как и для петли, для бочки потребуется разгон, но в этот раз нужен разгон по ветру. Дело в том, что во время бочки важно сохранить поступательное движение модели, и ветер будет хорошим помощником. Если же попробовать выполнить бочку против ветра, то модель сильно потеряет в скорости или даже остановится. О том, как выполнять бочку против ветра и не потерять скорость, я расскажу ниже.
Бочка
Итак, разгон взят, вертолет движется справа налево на высоте около 10-15 метров, до пилота остается около 10 метров. Перед самим маневром нужно перевести модель в горизонт и убрать управление по элеватору в ноль. Сразу после этого надо подать полные элероны в сторону. Будем делать переворот через правую сторону. После того, как модель начнет наклоняться, надо начать пропорционально и быстро убирать шаги, чтобы к положению «на ноже» шаги были полностью убраны в ноль. (Умение быстро и точно переводить стик шага в ноль очень пригодится не только для бочки, но и для многих других фигур 3D пилотажа.) Сейчас модель перешла в положении на ноже на правом боку и продолжает переворачиваться. Здесь нужно начать пропорционально добавлять отрицательный шаг. К моменту инвертного положения шаги должны быть примерно на уровне -5 градусов. Ко второму положению на ноже нужно опять убрать шаги в ноль и начать прибавлять положительные шаги при перевороте модели в нормальное положение. На деле маневр займет около 2 секунд, если использовать полное отклонение стика элеронов.
С чего начать.
Для начала я очень рекомендую освоить ролл на месте, чтобы отработать синхронное движение стиками. Ролл, это та же бочка, только без движения вперед. Проще всего делать ролл из положения «хвостом к себе». Единственное отличие от бочки в том, что для чистого ролла нужно коротко подкинуть модель вверх перед началом переворота и так же коротко подкинуть модель вверх отрицательными шагами в инвертной фазе. В положении «на ноже» шаги должны быть в нуле, так же как и у бочки. Для ролла и бочки важно двигать стик элеронов не задевая канал элеватора, иначе модель будет делать переворот, размахивая хостом.
Затем можно перейти к отработке бочки в движении. Удобнее всего начать отработку в зоне наилучшего восприятия модели. Обычно это вид на вертолет сзади. Начните маневр с разгона, пропустите модель мимо себя, затем выполните бочку, глядя на модель сзади. Здесь важно понимать, что на данном этапе наша цель — отработать моторику, чтобы руки понимали, как и в какие моменты нужно двигать стиками. По мере освоения бочки, начинайте маневр все раньше, чтобы постепенно научиться выполнять бочку симметрично относительно пилота. Не привыкайте делать однорукую бочку сбоку от себя! Правильная бочка начинается с одной стороны от пилота, заканчивается с другой стороны от пилота, а инвертная фаза располагается прямо перед пилотом.
Если вам трудно начать делать бочку, когда модель двигается к пилоту, или бочка в этом месте получается неровная, потренируйте ролл в том месте, где вы планируете начать бочку. Это позволит привыкнуть к виду и переворотам вертолета в сложном положении.
Что может пойти не так:
Задевание канала элеватора при работе по элеронам — самая частая ошибка. В результате при перевороте хвост модели описывает воронку. Отработайте ролл перед собой, чтобы хвост не описывал воронку, затем перенесите то же движение руками на бочку.
Несинхронная работа шагом. Если не убрать вовремя положительные шаги, модель будет описывать спираль вдоль линии полета. Если подать шаги не вовремя, модель будет отклоняться от прямолинейного движения. Опять же поможет практика на роллах, когда ошибки управления хорошо заметны, а повторять ролл можно снова и снова, полируя маневр.
Модель остановилась в инверте. Может быть две причины: встречный ветер и задевание канала элеватора. Если перед переворотом вы удерживали элеватор от себя, то в инверте модель поднимет нос вверх и потеряет скорость. Перед началом переворота убедитесь, что вы выровняли модель в горизонт и полностью убрали управление по элеватору.
Аварийный выход.
В большинстве ситуаций, теряя модель на бочке, не делайте лишних корректирующих движений. Продолжайте удерживать стик элеронов в сторону и дождитесь переворота модели в нормаль, после чего корректируйте ее положение.
Полировка маневра или как сделать бочку более чистой.
Для более точного удержания модели по высоте пригодится навык выполнения ролла с подкидыванием модели. За мгновение до начала переворота нужно коротко добавить положительных шагов и сразу убрать их, чтобы едва заметно подтолкнуть модель вверх. Модель, как бы, окажется в состоянии невесомости, и переворот пройдет без потери высоты. Аналогично в инверте — коротко добавить отрицательных шагов, чтобы подкинуть модель вверх, и закончить переворот на одной линии. Помните, что подбрасывать модель надо совсем немного, чтобы со стороны это движение было не заметно.
Выполнение бочки с подкидывание модели.
Для того, чтобы сохранить скорость при движении против ветра, нужно в нормальной и инвертной фазе держать нос модели немного наклоненный вперед. Для этого в нормальной фазе надо слегка подать элеватор вперед, а в инвертной фазе назад. Делать эти корректировки надо точно в тот момент, когда ротор находится в горизонте, иначе модель сойдет с прямой линии.
Для более точного попадания в нулевые шаги можно отработать движение стиками дома с пультом в руках. Для этого не понадобится симулятор. Возьмите пульт как обычно, смотрите вперед, затем многократно переводите стик шага в среднее положение из произвольных точек. Проверяйте, попали вы в середину или нет, глядя на риски на стике.
Тренируйтесь! Петля с бочкой непременно станут для вас привычными фигурами. Освоив обычную петлю, можно расширить репертуар с помощью квадратных и восьмигранных петель, петель с пируэтом в верхней точке. Развитие бочки, это две бочки подряд, четырехточечная бочка с фиксациями в положении на ноже и в горизонте, а также вариации бочки при движении хвостом вперед.
Удачных тренировок!
Источник: Олег Муринский
- 4
- max-kolosov
- 12 апреля 2012, 23:50
- 4706
- 0
- Поделиться:
Skookum SK 540 flybarless

Компания Skookum опубликовала полную спецификаю новой системы стабилизации для flybarless вертолетов SK-540. Релиз данного устройства ожидается в самое ближайшее время. За базу данной системы была взята модель SK-720 из которой был убрал «лишний» функционал для данного вида систем стабилизации, а именно: акселерометр и GPS модуль. Работа основывается на 2-х MEMS гироскопах и 32-х битном процессоре. Нет необходимости в адаптере SK-SB1 S-Bus, теперь сигнал S-Bus может быть подключен в любой разъем для сигналов сервоприводов. Также встроена функция гувернера и поддержка стабилизации квадкоптеров.
Спецификация:
— Размеры: 29x38x13мм.
— Вес: 18гр.
— 2 MEMS гироскопа.
— 32-х битный процессор.
— Алюминивый корпус.
— Совместимость DMSS, DSMX, DSM2, DMSS, Futaba SBus (без специального адаптера), PPM и обычные PWM сигналы.
— Поддержка 8-ми канальных приемников, в том числе через сателиты Spektrum, Futaba S-Bus и PPM приемников.
— Поддержка аналоговых и цифровых сервоприводов.
— Поддержка разных схем автомата перекоса: 120, 135/140, и 90 градусов eCCPM.
— Работа с 2,3,4 или 5 лопастными летательными аппаратами.
— Встроенное микшировние автомата перекоса.
— Поддержка сервоприводов с 1024 или 2048 шагов.
— Стабилизация квадкоптеров.
Источник: HeliPlane
Обновление прошивки от Castle Creations

Компания Castle Creations выпустила обновление прошивки для линейки регуляторов Phoenix. Обновление возможно через интерфейс Castle Link USB. Новая прошика v4.01 предназначена для регуляторов серий: Phoenix, Phoenix HV и Phoenix Ice, как замены предыдущей v4.00. Исправлены ошибки в записи логов контроллера, которые приводили к непредвиденной оставноке мотора, улчшен разгон мотора до 50% газа, который теперь составляет 0.08 с. Получить новую версию прошивки можно на официальном сайте компании по данной ссылке.
Источник: HeliPlane
Летная школа. Часть 4. Начальная аэробатика - полет кабиной веред.

Летная школа, Часть 4. Начальная аэробатика — полет кабиной веред.
После изучения четырех базовых ориентаций в нормальном полете, самое время заняться настоящими полетами и попробовать свои силы в аэробатике. Условимся называть аэробатикой выполнение фигур высшего пилотажа, в которых нет элементов, интенсивно использующих отрицательные шаги основного ротора. Тем не менее, перевернутые положения будут, например, во время выполнения петли или бочки. Таким образом, к аэробатике можно отнести следующие фигуры: полет по кругу, восьмерка, бочка, разворот на горке, мертвая петля, разворот Иммельмана, кубинская восьмерка, классическая авторотация. Разумеется, набор фигур не ограничивается этим списком. Существует множество других фигур и вариаций на тему приведенных фигур, например, сложная восьмерка, квадратные круги и восьмерки, двойной разворот Иммельмана, квадратные и восьмигранные петли и т.п. В противоположность аэробатике, пилотаж с интенсивным использованием отрицательных шагов будем называть 3D-пилотажем.
Если все идет правильно, то на данный момент у вас должны быть освоены следующие ориентации висения в нормальном полете:
1. ориентация хвостом к себе
2. ориентация левым боком к себе
3. ориентация правым боком к себе
4. ориентация кабиной к себе
И следующие навыки управления:
1. начальные навыки полета кабиной вперед
2. медленный пируэт на месте по часовой стрелке
3. медленный пируэт на месте против часовой стрелки
Итого в нормальной ориентации остались следующие навыки управления:
1. полет кабиной вперед
2. полет хвостом вперед
3. полет левым боком вперед
4. полет правым боком вперед
5. полет с пируэтом по часовой стрелке
6. полет с пируэтом против часовой стрелки
Прежде чем перейти к новому материалу, несколько упражнений на закрепление пройденного.
Движение влево-вправо в положении «кабиной к пилоту».
В исходном положении вертолет висит перед пилотом. Выполняется перемещение модели боком в одну сторону на 5 метров, возврат в исходное положение, затем в другую сторону на 5 метров и возврат. В крайних точках задержите модель на пару секунд. Особое внимание уделите контролю высоты и движению модели четко вдоль линии полетов. Если модель начнет надвигаться на вас или удаляться вглубь поля, делайте соответствующие корректировки элеватором, что бы удержать модель на одной линии.
Движение вперед-назад в положении «кабиной к пилоту».
Это упражнение аналогично предыдущему, но от исходного положения модель двигается на 5 метров на пилота и затем на 5 метров от пилота вглубь поля. Следите за высотой и прямолинейностью движения. Делайте короткие паузы в крайних точках.
Вертикальный круг с пируэтом 180 градусов.
Эта фигура взята из расписания второго уровня соревнований класса AMA.
Модель располагается в центре площадки 10 на 10 метров хвостом к пилоту. Модель взлетает на высоту, при которой лыжи будут на уровне глаз пилота. Пауза. Модель поворачивается на 90 градусов в любую сторону. Пауза. Модель начинает двигаться к краю площадки кабиной вперед, одновременно поднимаясь по дуге вверх на? круга и останавливается над границей площадки. Пауза. Модель выполняет разворот на 180 градусов, носом к центру площадки. Модель начинает двигаться к центру площадки, одновременно поднимаясь по дуге проходит вершину круга начинает спускаться и останавливается на противоположной стороне круга. Пауза. Пируэт на 180 градусов в положение – носом к центру площадки. Спуск по дуге до центра площадки. Пауза. Пируэт на 90 градусов в положение носом от пилота. Пауза. Посадка.
Новые фигуры.
После разминки приступим к новому материалу и начнем с отработки полетов кабиной вперед и простых фигур с ним связанных: круг, восьмерка, свечка, разворот на горке. Фигуры достаточно простые, выполняются без элементов перевернутого полета. Располагайте все фигуры перед собой и старайтесь выполнять фигуры симметрично относительно средней линии, на которой стоите.
Круг.
Во время выполнения этой фигуры вам придется последовательно задействовать все 4 изученные ориентации. Суть фигуры, как это несложно догадаться, в том, чтобы провести вертолет по кругу. При этом необходимо следить за следующими параметрами полета: высота, скорость, радиус, положение корпуса вертолета относительно траектории движения.
Если модель двигается по кругу на небольшой скорости, то ротор располагается практически горизонтально с небольшим наклоном к центру круга, а высота полета контролируется шагами. Скорость контролируется наклоном носа вертолета вперед с небольшим добавлением положительного шага, как при обычном горизонтальном полете. Закругление траектории практически полностью контролируется рулем с небольшим добавлением крена внутрь круга.
Если же скорость модели высока и ротор наклонен внутрь круга на угол примерно 20 градусов и более, то скорость контролируется преимущественно шагами. Ведение вертолета по закруглению траектории достигается за счет удерживания стика элеватора на себя, рулем лишь помогаем удерживать нос вертолета на траектории, добавляя немного руля к центру круга. Высота в этом случае практически полностью контролируется креном модели. Чем больше крен и меньше шаги, тем ниже опускается модель. Уменьшая крен и добавляя шаги, увеличиваем высоту.
Начать отработку полета по кругу следует с малой скорости, когда модель все время остается в висении, понемногу двигаясь по кругу. Короткими, легкими толчками элеватором вперед начните движение модели, рулем при этом начните направлять корпус модели по окружности и немного добавьте крена внутрь круга. Старайтесь не разгоняться, сейчас надо в висении провести модель по кругу. Если вертолет разгоняется и сходит с намеченной траектории наружу круга, притормозите его легким добавлением элеватора на себя. Будьте особенно внимательны при выходе модели кабиной на пилота. Если чувствуете неуверенность, поверните модель хвостом к себе, верните на исходную позицию и попробуйте еще раз. Постепенно наступайте на зону неуверенности, по мере того как будете чувствовать себя увереннее, входите в нее больше и больше и добейтесь полного замкнутого круга. Выполните это упражнение несколько раз для того, чтобы освоиться с кругом и попробуйте так же постепенно выполнить круг в другую сторону.
С ростом навыка попробуйте разогнать вертолет быстрее. Обратите внимание, что с ростом скорости потребуется сменить стиль управления и в основном управлять моделью элеватором и шагами, как это было описано ранее.
Тренируйте движение по кругу на разной скорости и высоте и пробуйте круги разного диаметра.
Восьмерка.
По сути, представляет собой два соединенных между собой круга. Классические восьмерки бывают трех типов: ленивая, которую проходили ранее, обычная, когда на боках восьмерки модель удаляется от пилота, т.е. ориентирована хвостом к пилоту и сложная, когда на боках восьмерки модель двигается на пилота, т.е. ориентирована кабиной к пилоту. Фокус восьмерки в том, что требуется сменить направление дуги в центре фигуры. Навык управления моделью при смене направления и режима движения один из ключевых в пилотировании вертолета. Смена направления присутствует во многих фигурах, и восьмерка — одна из них.
Сначала поговорим об обычной восьмерке. Как и в случае с полетом по кругу, начать отработку восьмерки следует на малой скорости, когда диск ротора остается практически горизонтально, а модель понемногу двигается по траектории. Особое внимание следует уделить точке смены направления в центре фигуры. Чтобы смена прошла плавно, нужно, чтобы в момент смены направления модель двигалась горизонтально и прямолинейно. Чем короче прямолинейный отрезок, тем правильнее восьмерка, но и сложность выполнения выше. Для начала делайте длинный прямолинейный участок, чтобы у вас было время сосредоточиться и сменить курс. Когда модель приближается от закругления к точке смены направления, нужно выровнять модель по крену и убрать руль в ноль. Выйдя на прямолинейный отрезок нужно подготовиться и начать выполнять круг в другую сторону. Если вы уже хорошо отработали полет по кругу в обе стороны, то с заходом на дугу не должно возникнуть затруднений. Иначе, отдельно потренируйте круги в обе стороны, и, затем, снова вернитесь к восьмеркам. По мере роста навыка сокращайте прямолинейный участок и увеличивайте скорость полета, чтобы переход с одного закругления на другое происходил в один прием: выравниваем модель и сразу заходим на следующее закругление. Обратите внимание, что во время прямолинейного движения на высокой скорости шаги надо убавить, иначе модель начнет набрать высоту, поскольку для движения по кругу на скорости требуется больше тяги.
Держите фигуру симметрично относительно средней линии так, чтобы один круг располагался слева от пилота, второй справа и точка смены курса была прямо перед пилотом.
Сложная восьмерка выполняется, так же как и простая, за исключением обратного направления движения и позволит отлично отработать навыка полета кабиной на себя. Основной момент — выход модели по кругу на пилота. Это движение следует отработать особенно тщательно, чтобы научиться не «терять» модель в этом положении. Смена направления в центре восьмерки уже не будет представлять особой сложности после освоение простой восьмерки.
Разворот на горке.
Высокий разворот на горке хорошо смотрится сам по себе, а пилоту позволяет развернуть модель и набрать скорость для выполнения следующей фигуры.
Для выполнения полноценного разворота на горке необходимо хорошо разогнать модель во время горизонтального пролета вдоль линии полетов. Затем, на удалении около 20 метров в стороне от пилота, плавно начать тянуть элеватор на себя и понемногу добавлять шаги. По мере подъема, продолжайте удерживать шаги и элеватор. Когда корпус модели окажется близко к вертикальном положении, нужно начать плавно, но быстро убирать шаги и элеватор, одновременно доведя положение модели до вертикального. Далее модель будет некоторое время подниматься вверх по инерции. Дождитесь, пока модель практически погасит вертикальную скорость, и, одновременно с остановкой модели, выполните разворот на 180 градусов с помощью руля. Что бы маневр был более цельным, можно начать разворот за мгновение до остановки подъема и закончить разворот сразу с началом спуска модели. Когда модель пройдет вертикально вниз путь равный вертикальному подъему, надо начать плавно добавлять шаги и одновременно выводить модель в горизонтальный полет с помощью элеватора. В идеале траектория спуска должна полностью совпадать с траекторией подъема, в том числе и высота входа на разворот должна совпадать с высотой выхода.
Начать отрабатывать разворот на горке следует с небольшой скорости и небольшого угла подъема, как это было описано в маневре «Ленивый» разворот на горке во второй части «Летной школы». Следите за тем, что бы начинать подъем плавно, без рывка элеватора на себя, иначе модель потеряет горизонтальную скорость, а фигура получится низкой и дерганой.
С ростом навыком можно выполнять растянутый разворот на горке, который позволяет выполнить очень высокий разворот. Высота будет ограничена только летными качествами вашей модели: размахом лопастей и мощностью мотора. Во время подъема на горку добавляются почти полные шаги, а положение корпуса модели немного отстает от траектории движения, так, чтобы ротор был немного направлен в сторону подъема. В этом случае модель затягивается вверх не только за счет горизонтальной скорости, но и за счет вертикальной тяги ротора.
Свечка.
Представляет собой крутой разворот с подъемом и позволяет за счет сохранения скорости при развороте и быстрого спуска набрать большую горизонтальную скорость. Это может пригодиться для разгона перед выполнением фигур «петля» и «бочка». Начало фигуры выполняется как заход на горку, но угол подъема около 60 градусов. Поднявшись на достаточную высоту надо рулем и элеватором выполнить разворот небольшого радиуса на 180 градусов. Разворот аналогичен движению по кругу на большой скорости. Во время маневра модель надо наклонить в сторону разворота элеронами, затем элеватором на себя, направить модель на разворот, и добавлением руля к центру поворота, удержать направление корпуса вертолета на траектории. Радиус разворота нужно подобрать экспериментально, с целью минимальной потери скорости при развороте. На выходе со свечки модель наберет солидную горизонтальную скорость, особенно если на спуске добавить хороших шагов и наклонить ротор немного вперед по направлению движения модели. В целом свечка и разворот на горке практически совпадают по назначению. Свечку можно выполнять попеременно с горкой для разнообразия.
Заключение.
Четыре приведенные фигуры можно тренировать параллельно, поскольку в основе своей это просто полет кабиной вперед. Начните с медленных фигур. За один полет можно тренировать, к примеру, круги и низкую горку, в следующий полет круги в другую сторону и низкую свечку. Перед началом отработки новой фигуры полезно полетать что-то из пройденного материала, что бы настроиться на полет. Если в процессе тренировки вы почувствуете, что ваши нервы слишком напряжены, выполните несколько отработанных ранее фигур, что бы успокоиться, и пробуйте новые фигуры снова.
Хороших тренировок!
Источник: Олег Муринский
- 1
- max-kolosov
- 02 апреля 2012, 03:25
- 3280
- 1
- Поделиться:
Thunder Tiger Titan X50E FBL combo

Компания Thunder Tiger представила безфлайбарный электро-вертолет Titan X50E FBL, в виде комбо кита, который включает в себя: бесколлекторный мотор Kontronik Pyro 600-09E и контроллер Kontronik Jazz 80LV. Данный вертолет относится к 50-ому классу и предназначен для использования с 5S и 6S Li-Po батареями, в комплект также входит система виртуальной сервооси GT-5 и хвостовая серва DS0606n. Видео полетов данного вертолета можно найти на сайте: thundertiger.tv.
Источник: HeliPlane